EMAROs – Mini robot for research and education
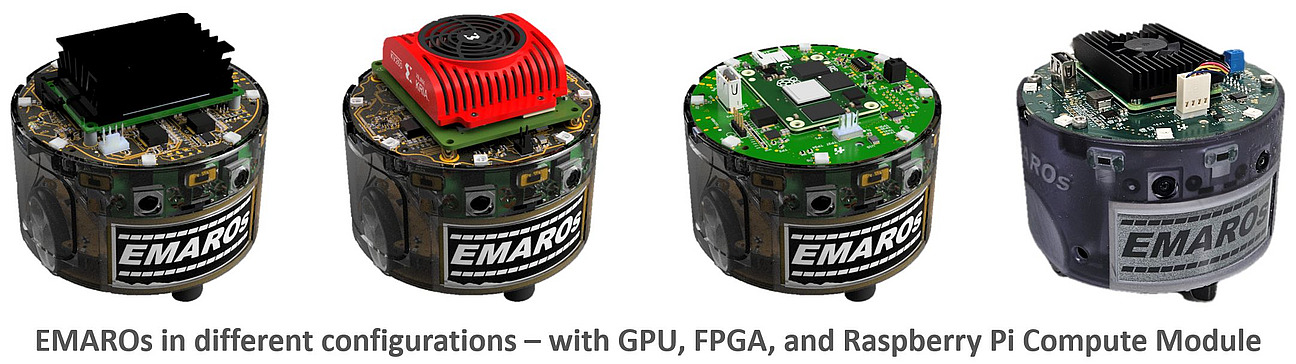
Mobile mini-robots are being increasingly used for research and education. In this area, our mini-robot EMAROs (Educational Modular Autonomous Robot Osnabrück) positions itself with a unique combination of modularity, computing capabilities, sensor technologies, and software support. EMAROs is equipped with two cameras for stereo vision, an inertial measurement unit(IMU), distance sensors, and a wide variety of additional sensors and communication interfaces.
An important feature of the robot is its highly modular integrated computing infrastructure. In addition to challenges in robotics, this enables exciting projects in the field of heterogeneous hardware architectures and domain-specific accelerators. Despite its small size, with a diameter of around 10 cm, a wide variety of computing nodes can be integrated into EMAROs. The possibilities range from embedded CPUs and graphics processing units (GPUs) to reconfigurable hardware (FPGAs) and special accelerators for machine learning. ROS 2 (Robot Operating System) is used as the main programming framework for EMAROs. Thanks to extensive software support for EMAROs, students can concentrate on the development of new algorithms and their resource-efficient implementation, comparing the different computing platforms.
VERA – Virtual environment for real-world robotics experiments
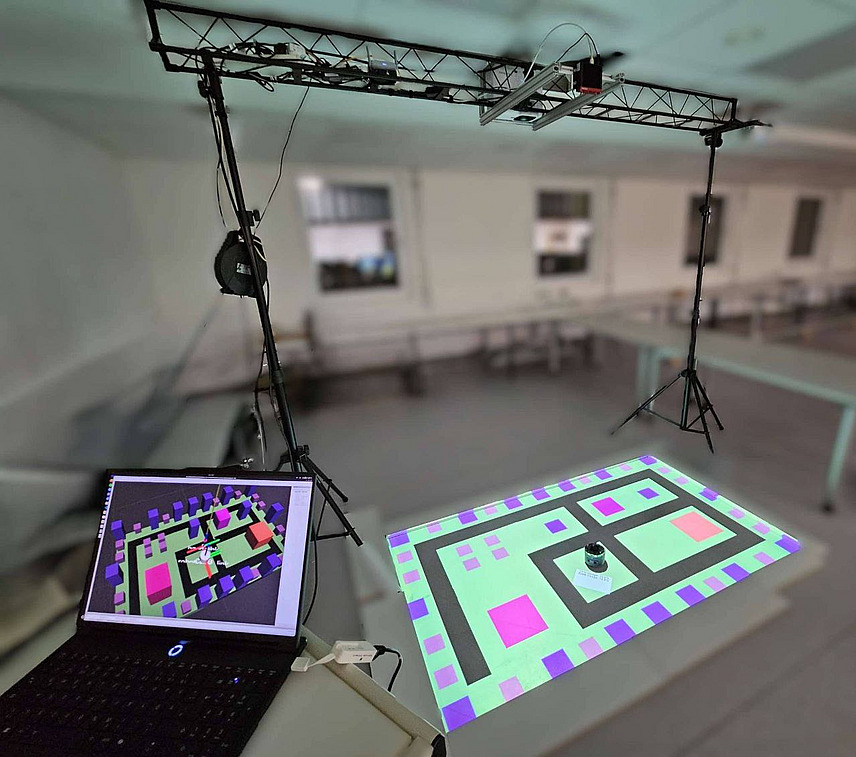
As an evaluation platform for EMAROs and other mini-robots, we are developing VERA – the Virtual Environment for mobile Robot Applications. VERA is a modular and scalable framework that integrates concepts of digital twins, augmented reality, and vehicle-in-the-loop testing to bridge the gap between simulation and real-world testing. VERA enables synchronized virtual and projected environments, allowing robots to interact dynamically within both environment representations.
The system architecture comprises three key components: The Virtual Environment Positioning System (VEPS) for real-time localization of robots, an environment manager for dynamic object handling and path tracking, as well as a visualization component to project the virtual environment with additional AR-like features into the real world. VERA’s capabilities are demonstrated with our mini robot platform EMAROs. New algorithms for path tracking, navigation, and object manipulation can be tested with the real robot in a projected virtual world.
VERA can be easily customized and extended toward new robot applications. By combining and synchronizing simulated and projected environments, VERA provides a flexible platform for the development and real-time testing of mobile robot applications
Selected Publications
- Gehricke, P.; Tassemeier, M.; Porrmann, M.:
EMAROs: A Modular Autonomous Robot-Platform for Research and Education.
In: International Conference on Robotics in Education, RiE 2025, Thessaloniki, Greece, April 23-25, 2025, pp. 533-544.
DOI: https://doi.org/10.1007/978-3-031-98762-5_45