Mobile robotics – Resource-efficient processing for energy-constrained autonomous systems
In robotics, we are particularly interested in mobile systems with limited energy budgets. These systems are equipped with increasingly powerful sensor systems, such as high-resolution cameras or 3D laser scanners. Processing the constantly growing amount of data on the robot in real-time requires more and more embedded computing power, while energy requirements should not increase. Therefore, we apply our expertise in the field of domain-specific hardware and efficient parallel programming.
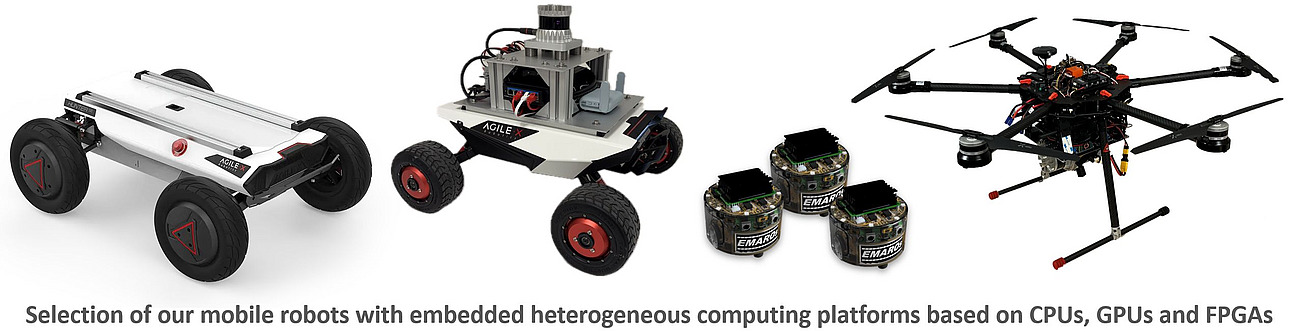
Our systems range from the small EMAROs mini-robots developed in our group to high-performance platforms for outdoor use and drones of various sizes with payloads of up to 5 kg. All platforms are equipped with our own computing hardware and sensors, often based on dedicated printed circuit boards developed by us. As with the accelerators for AI algorithms, we rely on a codesign approach where algorithms are individually optimized for the respective processor platform. In addition to embedded processors and GPUs, FPGAs are applied so that algorithms and hardware can be optimally matched and even adapted at run-time.
For easy use of our hardware-software solutions in mobile robots, we use the Robot Operating System (ROS 2) as a middleware layer. With ReconfROS, we have developed a framework that enables simple utilization of FPGA-based hardware accelerators in ROS. Additional work includes real-time processing of LiDAR data for localization and mapping directly on robots and drones using optimized algorithms for embedded GPUs and FPGAs.
Selected Publications
- Eisoldt, M.; Mock, A.; Wiemann, T.; Porrmann, M.:
Efficient Global 6D Localization in 3D TSDF Maps Using Point-wise and Scan-wise Reduction Methods on Embedded GPUs.
In International Journal of Semantic Computing, 19(1), pp. 105-125, World Scientific Publishing Company, March 2025.
DOI: https://doi.org/10.1142/S1793351X25410053 - Gehricke, P.; Tassemeier, M.; Porrmann, M.:
EMAROs: A Modular Autonomous Robot-Platform for Research and Education.
In: International Conference on Robotics in Education, RiE 2025, Thessaloniki, Greece, April 23-25, 2025, pp. 533-544.
DOI: https://doi.org/10.1007/978-3-031-98762-5_45 - Eisoldt, M.; Mock, A.; Wiemann, T.; Porrmann, M.:
Towards 6D MCL for LiDARs in 3D TSDF Maps on Embedded Systems with GPUs.
In International Journal of Semantic Computing, World Scientific Publishing Company (accepted for publication). - Gaal, J.; Wiemann, T.; Mock, A.; Porrmann, M.:
FeatSense - A Feature-based Registration Algorithm with GPU-accelerated TSDF-Mapping Backend for NVIDIA Jetson Boards.
In: IEEE Robotic Computing, IRC 2023, Laguna Hills, CA, USA, December 11-13, 2023, pp. 198-205.
DOI: doi.org/10.1109/IRC59093.2023.00040 - Eisoldt, M.; Mock, A.; Porrmann, M.; Wiemann, T.:
Towards 6D MCL for LiDARs in 3D TSDF Maps on Embedded Systems with GPUs.
In: IEEE Robotic Computing, IRC 2023, Laguna Hills, CA, USA, December 11-13, 2023, pp.158-165.
DOI: doi.org/10.1109/IRC59093.2023.00035 - Rahn, S.; Gehricke, P.; Petermöller, C.-L.; Neumann, E.; Schlinge, P.; Rabius, L.; Termühlen, H.; Sieh, C.; Tassemeier, M.; Wiemann, T.; Porrmann, M.:
Redrose – Reconfigurable drone setup for resource-efficient SLAM.
In: Proceedings of DroneSE and RAPIDO: System Engineering for Constrained Embedded Systems), Toulouse, France, January 18, 2023, pp. 20-30.
DOI: doi.org/10.1145/3579170.3579266 - Eisoldt, M.; Flottmann, M.; Gaal, J.; Hinderink, S.; Vana, J.; Tassemeier, M.; Rothmann, M.; Wiemann, T.; Porrmann, M.:
ReconfROS: An Approach for Accelerating ROS Nodes on Reconfigurable SoCs.
In: Microprocessors and Microsystems, Vol. 94, Elsevier, 2022,
DOI: doi.org/10.1016/j.micpro.2022.104655 - Eisoldt, M.; Gaal, J.; Wiemann, T.; Flottmann, M.; Rothmann, M.; Tassemeier, M.; Porrmann, M.:
A Fully Integrated System for Hardware-accelerated TSDF SLAM with LiDAR Sensors (HATSDF SLAM).
In: Robotics and Autonomous Systems, Vol. 156, October 2022,
DOI: doi.org/10.1016/j.robot.2022.104205 - Wiemann, T.; Eisoldt, M.; Flottmann, M.; Gaal, J.; Rothmann, M.; Tassemeier, M.; Porrmann, M.:
Energieeffizientes FPGA-basiertes TSDF-SLAM für Mobile Mapping.
In: 20. Oldenburger 3D-Tage. February 2-3, 2022. - Flottmann, M.; Eisoldt, M.; Gaal, J.; Rothmann, M.; Tassemeier, M.; Wiemann, T.; Porrmann, M.:
Energy-efficient FPGA-accelerated LiDAR-based SLAM for Embedded Robotics.
In: International Conference on Field-Programmable Technology (FPT 2021), Auckland, New Zealand, December 6-10, 2021.
DOI: doi.org/10.1109/ICFPT52863.2021.9609934 - Eisoldt, M.; Flottmann, M.; Gaal, J.; Buschermöhle, P.; Hinderink, S.; Hillmann, M.; Nitschmann, A.; Hoffmann, P.; Wiemann, T.; Porrmann, M.:
HATSDF SLAM – Hardware-accelerated TSDF SLAM for Reconfigurable SoCs.
In: European Conference on Mobile Robots (ECMR 2021), Bonn, Germany, August 31st – September 3rd, 2021.
DOI: doi.org/10.1109/ECMR50962.2021.9568815 - Eisoldt, M.; Flottmann, M.; Gaal, J.; Hinderink, S.; Vana, J.; Rothmann, M.; Tassemeier, M.; Wiemann, T.; Porrmann, M.:
ReconfROS: Running ROS on Reconfigurable SoCs.
In: Drone Systems Engineering (DroneSE-2021), Budapest, Hungary, January 18, 2021.
DOI: doi.org/10.1145/3444950.3444959 - Meyer, H.; Klimeck, D.; Paskarbeit, J.; Rückert, U.; Egelhaaf, M.; Porrmann, M.; Schneider, A.:
Resource-efficient bio-inspired visual processing on the hexapod walking robot HECTOR.
In: PLoS ONE 15(4): e0230620; 2020,
DOI: doi.org/10.1371/journal.pone.0230620.